1、 开发环境采用Eclipse, 支持C/C++编程语言
2、操作系统支持Linux以及VxWorks
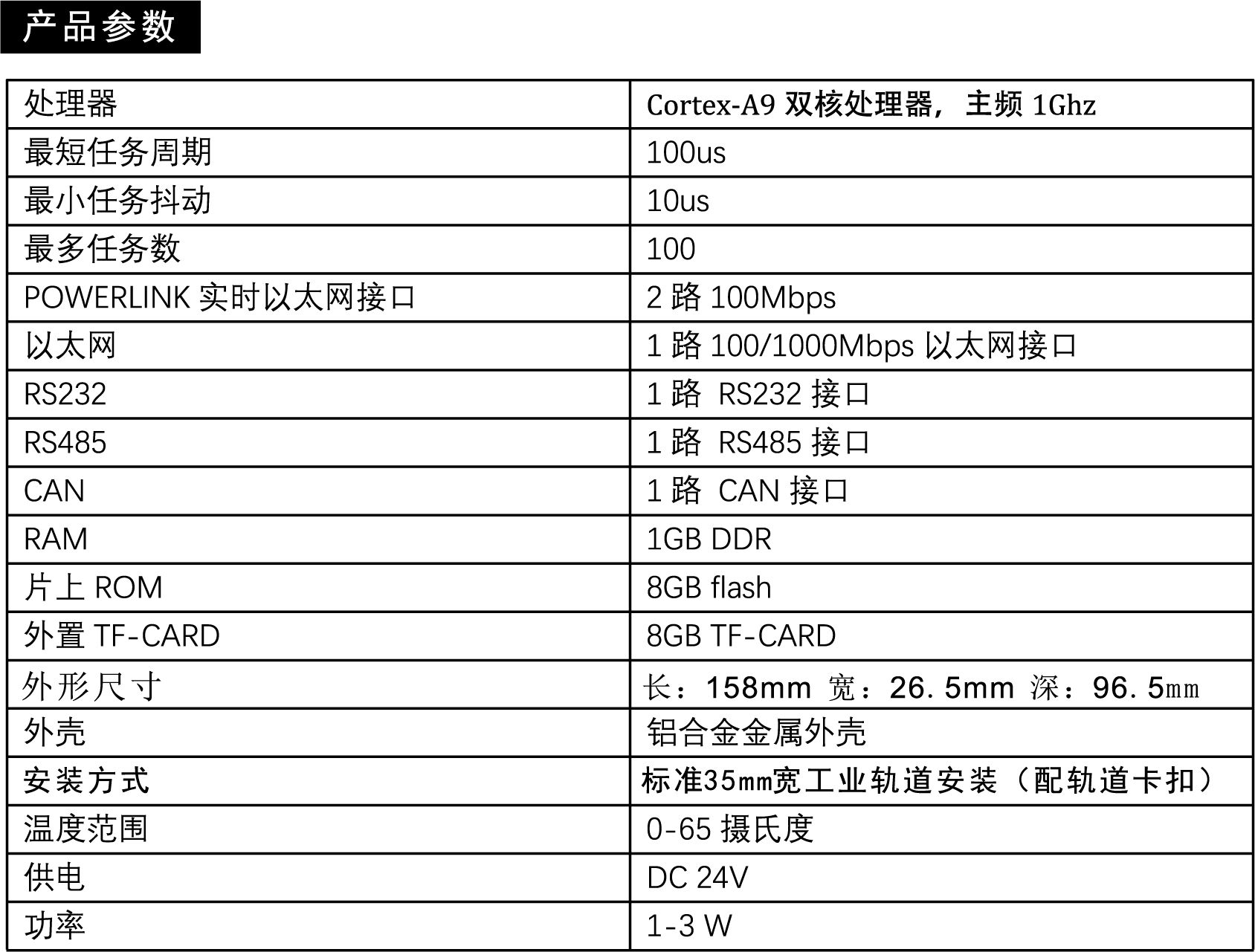
3、高性能MCU,双核A9,各1Ghz 主频
4、集成高性能POWERLINK,最短通信周期可达50us
5、集成高性能实时操作系统,最短任务周期100us
6、集成CANopen通信协议
7、集成以太网通信协议TCP/IP
8、集成RS232,SPI,CAN,RS485等通信接口
9、可选配Infoteam的SoftPLC ,支持梯形图,结构文本,指令表,CFC,SFC等编程语言10,可控制多于100个轴的同步
11、支持直角坐标机器人,SCARA机器人,DELTA机器人,串联4/6轴机器人等
12、支持单轴控制,电子齿轮,电子凸轮等
13、产品稳定性、实时性高,体积小、功耗低
14、采用FPGA实时控制解决方案
15、可用于机器人产线,过程控制,运动控制
16、Powerlink总线和Ehtercat总线